| English | 한국어 | 日本語 | Tiếng Việt |
Hướng dẫn phát triển ứng dụng
Mục lục
1. Entry Points
Tất cả các nguyên mẫu hàm đều như sau:
#ifdef WIN32
#define TS_ANPR_ENTRY extern "C" __declspec(dllexport) const char* WINAPI
#else
#define TS_ANPR_ENTRY extern "C" const char*
#endif
Để tránh dài dòng, các phần sau đây sẽ được ký hiệu là TS_ANPR_ENTRY.
1.1. anpr_initialize
Khởi tạo thư viện. Để sử dụng thư viện, hàm này phải được gọi một lần trước tất cả các hàm khác.
TS_ANPR_ENTRY anpr_initialize(const char* mode); // [IN] Thiết lập chế độ hoạt động của thư viện
Tham số:
mode- Được sử dụng để chỉ định chế độ hoạt động của thư viện (được mở rộng từ mục đích ban đầu là
outputFormat) - Có thể chỉ định nhiều thiết lập bằng cách phân tách bằng dấu chấm phẩy (
;) (ví dụ:json;sync)# Ví dụ Python # nhiều cài đặt err = anpr_initialize(b'json;sync')
- Được sử dụng để chỉ định chế độ hoạt động của thư viện (được mở rộng từ mục đích ban đầu là
- Các mục có thể chỉ định
outputFormat:- Định dạng dữ liệu đầu ra
- Các định dạng hỗ trợ:
text,json,yaml,xml,csv(mặc định:text) - Có thể sử dụng trực tiếp
text,jsonmà không cần ghi rõoutputFormat
sync:- Chạy ở chế độ đồng bộ (sử dụng khóa thread và xử lý theo thứ tự gọi)
- Nếu ứng dụng của bạn không sử dụng thread pool cố định mà liên tục tạo mới thread, có thể xem xét sử dụng khi gặp các mã lỗi sau:
103: Too many workersSố lượng thread gọi thư viện vượt quá giới hạn (tối đa 256)104: Resource exhaustedResource exhausted Không thể cấp phát thêm tài nguyên
- Không cần quản lý thread bất đồng bộ phức tạp, nhưng hiệu năng xử lý song song có thể giảm do sử dụng khóa thread (lock)
- Có thể chỉ định bằng
sync=truehoặcsync=false, hoặc chỉ cần ghisync(nếu không chỉ định, mặc định làsync=false)# Ví dụ Python # Chạy ở chế độ đồng bộ err = anpr_initialize(b'sync')
minChar:- Chỉ định số lượng ký tự tối thiểu để nhận diện biển số thành công
- Nếu không chỉ định hoặc giá trị là
0, số âm hoặc không phải số, mặc định là4- Ví dụ đúng:
minChar=5(biển số phải có ít nhất 5 ký tự để nhận diện thành công)# Ví dụ Python # Cài đặt nhận diện số thành công khi có từ 5 ký tự trở lên err = anpr_initialize(b'minChar=5') - Ví dụ sai:
minChar=0,minChar=-10,minChar=hai ký tự(giá trị bị bỏ qua, áp dụng mặc định là4)
- Ví dụ đúng:
country:- Chỉ định quốc gia cho mô hình nhận diện biển số xe.
- Ví dụ sử dụng:
country=JP(thiết lập cho biển số Nhật Bản)
- Ví dụ sử dụng:
- Các mã quốc gia có sẵn:
KR: Biển số Hàn QuốcJP: Biển số Nhật BảnVN: Biển số Việt Nam# Ví dụ Python # Cách chỉ định quốc gia err = anpr_initialize(b'country=KR') # Biển số Hàn Quốc (mặc định) err = anpr_initialize(b'country=JP') # Biển số Nhật Bản err = anpr_initialize(b'country=VN') # Biển số Việt Nam
- Với bản dùng thử miễn phí, bạn có thể chỉ định mã quốc gia trong ứng dụng, nhưng với giấy phép thương mại, quốc gia được hỗ trợ sẽ do giấy phép đã mua quyết định.
- Chỉ định quốc gia cho mô hình nhận diện biển số xe.
symbol: (chỉ dành cho biển số Nhật Bản)- Chỉ định cách xuất ký tự
·,-trên biển số Nhậtnone: Không xuất ký tự·,-(giá trị mặc định)zero: Xuất·thành0, không xuấ-dot: Xuất nguyên ký tự·, không xuất-full: Xuất nguyên ký tự·,-# Ví dụ Python # Xuất nguyên ký tự ·, - err = anpr_initialize(b'symbol=full')
- Chỉ định cách xuất ký tự
Giá trị trả về:
- Nếu thành công, trả về chuỗi rỗng kết thúc bằng ký tự NULL(
NULL terminated string (0x00)). - Nếu có lỗi, trả về chuỗi thông báo lỗi theo định dạng dữ liệu được chỉ định trong
outputFormatcủamode(mã hóa utf-8).
1.2. anpr_read_file
Nhận dạng biển số xe từ tệp hình ảnh.
TS_ANPR_ENTRY anpr_read_file(
const char* imgFileName, // [IN] Tên tệp hình ảnh đầu vào
const char* outputFormat, // [IN] Định dạng dữ liệu đầu ra
const char* options); // [IN] Tùy chọn chức năng
Tham số:
imgFileName:- Tên tệp hình ảnh đầu vào (mã hóa utf-8)
- Các định dạng hình ảnh được hỗ trợ:
bmp,jpg,png,pnm,pbm,pgm,ppm,jfif,webp
outputFormat:- Định dạng dữ liệu đầu ra
- Các định dạng hỗ trợ:
text,json,yaml,xml,csv(mặc định:text) - Khi sử dụng tùy chọn nhận diện đối tượng,
textsẽ được xuất ra dưới dạngcsv.
options:- Chỉ định các tùy chọn cho thuật toán nhận diện biển số xe. (Tham khảo: 2. Tùy chọn nhận diện)
Giá trị trả về:
- Trả về kết quả nhận diện biển số xe dưới dạng chuỗi theo định dạng dữ liệu được chỉ định trong
outputFormat(mã hóa utf-8). -
Tùy theo các
optionssử dụng cho nhận diện biển số hoặc nhận diện đối tượng, định dạng củaoutputFormatsẽ được phân tách tương ứng. (Tham khảo: 3. Định dạng dữ liệu xuất ra)# Ví dụ Python result = anpr_read_file(b'input-image.jpg', b'json', b'vms') if len(result) > 0: print(result.decode('utf8'))
Lưu ý:
- Bộ đệm chuỗi được sử dụng cho giá trị trả về được quản lý bên trong thư viện, ứng dụng chỉ cần tham chiếu đến bộ đệm chuỗi này.
- Bộ đệm chuỗi này an toàn với đa luồng (thread-safe) và kết quả sẽ được giữ lại cho từng luồng cho đến khi có lệnh gọi tiếp theo.
- Trang tham khảo
- https://docs.microsoft.com/ko-kr/windows/win32/medfound/image-stride
- https://docs.microsoft.com/ko-kr/windows/win32/medfound/video-fourccs
1.3. anpr_read_pixels
Nhận diện biển số xe từ bộ nhớ đệm (buffer) hình ảnh đã tải vào.
Từ phiên bản TS-ANPR v2.3.0, hỗ trợ cả hình ảnh đã được mã hóa.
TS_ANPR_ENTRY anpr_read_pixels(
const unsigned char* pixels, // [IN] Địa chỉ bắt đầu của pixel hình ảnh
const unsigned long width, // [IN] Số pixel chiều rộng của hình ảnh
const unsigned long height, // [IN] Số pixel chiều cao của hình ảnh
const long stride, // [IN] Số byte trên một dòng hình ảnh
const char* pixelFormat, // [IN] Định dạng pixel của hình ảnh
const char* outputFormat, // [IN] Định dạng dữ liệu đầu ra
const char* options); // [IN] Tùy chọn chức năng
Tham số:
pixels:- Địa chỉ bắt đầu của pixel hình ảnh
width:- Số pixel chiều rộng của hình ảnh
- Nếu là hình ảnh đã mã hóa, đây là tổng số byte của hình ảnh
height:- Số pixel chiều cao của hình ảnh
- Nếu là hình ảnh đã mã hóa, không sử dụng (mặc định đặt là
0)
stride:- Số byte trên một dòng hình ảnh (nếu là
0sẽ tự động tính toán, giả định không có padding) - Nếu là hình ảnh đã mã hóa, không sử dụng (mặc định đặt là
0)
- Số byte trên một dòng hình ảnh (nếu là
pixelFormat:- Định dạng pixel của hình ảnh
- Các định dạng pixel hỗ trợ:
GRAY: 흑백 이미지 (8bpp)BGRA: BGRA (32bpp)RGBA: RGBA (32bpp)RGB: RGB (24bpp)BGR: BGR (24bpp)BGR555: BGR (16bpp)BGR565: BGR (16bpp)HSV: HSV (32bpp)YCrCb: YUV444 (32bpp)I420: YUV420 (12bpp)YV12: YUV420 (12bpp)IYUV: YUV420 (12bpp)NV12: YUV420 (12bpp)NV21: YUV420 (12bpp)
- Các định dạng hình ảnh mã hóa hỗ trợ:
bmp,jpg,jpeg,png,pnm,pbm,pgm,ppm,jfif,webp- Nếu chỉ định là
encoded, định dạng hình ảnh sẽ tự động nhận diện
outputFormat: (giống nhưanpr_read_file)options: (giống nhưanpr_read_file)
Giá trị trả về: (giống như anpr_read_file)
Lưu ý: (giống như anpr_read_file)
# Ví dụ Python
# Nhập khung hình video
ret, frame = capture.read()
height = frame.shape[0]
width = frame.shape[1]
result = anpr_read_pixels(bytes(frame), width, height, 0, b'BGR', b'json', b'vms')
if len(result) > 0:
print(result.decode('utf8'))
# Nhập hình ảnh từ trang web
response = requests.get('https://example.com/image.jpg')
if response.status_code == 200:
result = anpr_read_pixels(response.content, 0, 0, 0, b'encoded', b'json', b'vms')
if len(result) > 0:
print(result.decode('utf8'))
2. Tùy chọn nhận diện
- Có thể chỉ định nhiều tùy chọn khác nhau để điều chỉnh thuật toán nhận diện biển số xe phù hợp với môi trường sử dụng.
2.1. Danh sách tùy chọn hỗ trợ theo loại giấy phép
| Ký tự | Ý nghĩa | Giấy phép áp dụng |
|---|---|---|
v |
Xác định biển số đã gắn trên xe hay chưa | Tất cả |
b |
Nhận diện một trong các biển số đã gắn trên xe | Tất cả |
m |
Nhận diện tất cả biển số xe của nhiều xe (nhận diện đa biển số) | Nhận diện đối tượng, Pro, Server |
s |
Nhận diện biển số ở mọi góc độ 360° của xe (nhận diện surround) | Nhận diện đối tượng, Pro, Server |
d |
Nhận diện đối tượng (phân biệt xe tải/trống) | Tất cả |
r |
Nhận diện biển số của đối tượng (xe) đã nhận diện | Tất cả |
i |
Thiết lập vùng quan tâm (RoI) | Tất cả |
x |
Thiết lập vùng không quan tâm (RoU) | Tất cả |
a |
Thiết lập kích thước tối thiểu của biển số xe | Tất cả |
- Tùy theo loại giấy phép, số lượng xe nhận diện được và các chức năng sẽ khác nhau. (Tham khảo: Động cơ TS-ANPR)
2.2. Hướng dẫn lựa chọn tùy chọn
rên sơ đồ luồng bên dưới, khi di chuyển từ Bắt đầu đến Hoàn tất lựa chọn, hãy gom các ký tự trong các vòng tròn màu xanh lá mà bạn đã đi qua để sử dụng làm giá trị tùy chọn. (Thứ tự các ký tự không quan trọng.)
Ví dụ: Nếu đường đi là Bắt đầu → v → s → m → Hoàn tất lựa chọn, giá trị tùy chọn sẽ là "vsm".
flowchart TD
start[/Bắt đầu/]-->attach
attach-->|Không quan trọng|multi
attach-->|Chỉ biển số đã gắn trên xe|v((v)):::opt
v-->angle
angle-->|Chỉ xe đứng thẳng|multi
angle-->|Mọi góc độ 360°|s((s)):::opt
s-->multi
multi-->|Có|m((m)):::opt
multi-->|Không|done[/Hoàn tất lựa chọn/]
m-->done
start-->d((d)):::opt
d-->angle2
angle2-->|Chỉ xe đứng thẳng|multi2
angle2-->|Mọi góc độ 360°|s2((s)):::opt
s2-->multi2
multi2-->|Có|m2((m)):::opt
multi2-->|Không|read
m2-->read
read-->|Có|r((r)):::opt
read-->|Không|done
r-->done
subgraph "Nhận diện biển số"
attach
v
angle
multi
m
s
end
subgraph "Nhận diện đối tượng"
read
angle2
multi2
s2
m2
d
r
end
classDef opt fill:#6F6,stroke:#CCC,stroke-width:4px,padding:10px,font-weight:bold
-
Ví dụ sử dụng tùy chọn nhận diện biển số | options | Ý nghĩa |———|———————————————————— | | Nhận diện một trong tất cả các biển số |
v| Nhận diện một trong các biển số đã gắn trên xe |b| Nhận diện một biển số được gắn trên xe máy (Chỉ áp dụng cho biển số Việt Nam) |m| Nhận diện đa biển số (tất cả các biển số) |vm| Nhận diện đa biển số đã gắn trên xe |vs| Nhận diện một biển số đã gắn trên xe, mọi góc độ 360° |vsm| Nhận diện đa biển số đã gắn trên xe, mọi góc độ 360° -
Ví dụ sử dụng tùy chọn nhận diện đối tượng | options | Ý nghĩa |———|———————————————————— |
d| Nhận diện một đối tượng (không nhận diện biển số xe) |dr| Nhận diện một đối tượng, nhận diện biển số xe |ds| Nhận diện một đối tượng, mọi góc độ 360° (không nhận diện biển số xe) |dsr| Nhận diện một đối tượng, mọi góc độ 360°, nhận diện biển số xe |dm| Nhận diện đa đối tượng (không nhận diện biển số xe) |dmr| Nhận diện đa đối tượng, nhận diện biển số xe |dms| Nhận diện đa đối tượng, mọi góc độ 360° (không nhận diện biển số xe) |dmsr| Nhận diện đa đối tượng, mọi góc độ 360°, nhận diện biển số xe
2.3. Thiết lập vùng quan tâm (RoI) / Vùng không quan tâm (RoU)
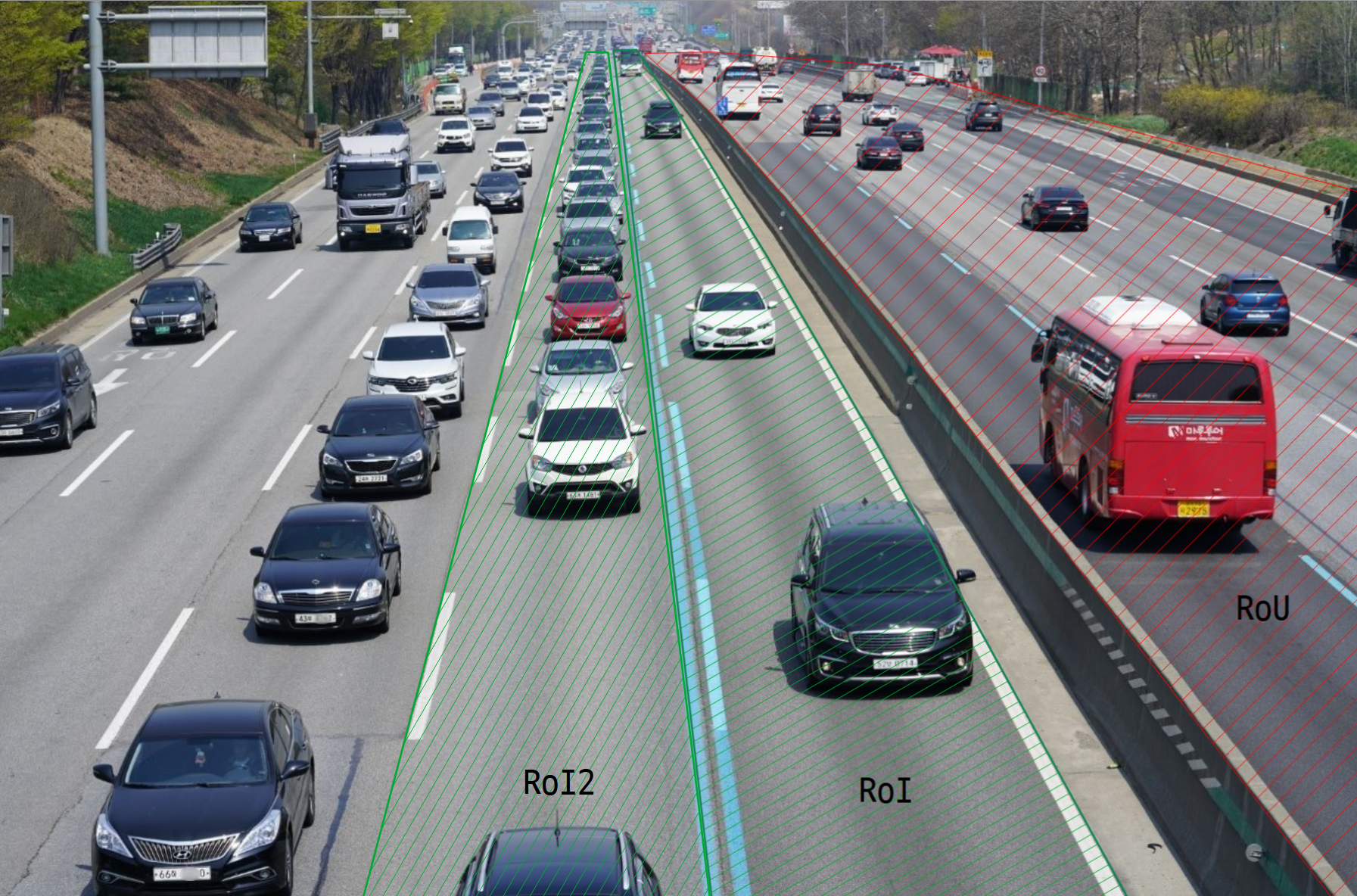
Vùng quan tâm(RoI)
- Vùng quan tâm được biểu diễn bằng một vùng đa giác nối các tọa độ pixel của từng đỉnh.
- Sau ký tự
i, liệt kê tọa độ pixel của từng đỉnh theo thứ tự x, y, cách nhau bằng dấu phẩy.
- Sau ký tự
- Có thể thiết lập nhiều vùng quan tâm và có thể kết hợp với các tùy chọn nhận diện biển số khác.
Vùng không quan tâm(RoU)
- Vùng không quan tâm được biểu diễn bằng một vùng đa giác nối các tọa độ pixel của từng đỉnh.
- Sau ký tự
x, liệt kê tọa độ pixel của từng đỉnh theo thứ tự x, y, cách nhau bằng dấu phẩy.
- Sau ký tự
- Có thể thiết lập nhiều vùng không quan tâm và có thể kết hợp với các tùy chọn nhận diện biển số khác.
[Lưu ý] Nếu không chỉ định vùng quan tâm hoặc vùng không quan tâm, hệ thống sẽ nhận diện biển số trên toàn bộ hình ảnh. Nếu chỉ định cả vùng quan tâm và vùng không quan tâm, các khu vực bị chồng lấp sẽ ưu tiên vùng không quan tâm. Do đó, tất cả biển số xe nằm trong vùng chồng lấp sẽ bị bỏ qua.
# Ví dụ Python
# Khi tọa độ pixel của từng đỉnh đa giác cho mỗi vùng trên ảnh như sau:
# RoI = [(810,64), (939,1182), (1486,1182), (1149,571), (879,124), (839,64)]
# RoI2 = [(771,67), (479,1182), (1793,1182), (801,67)]
# RoU = [(851,70), (923,134), (1753,1182), (1789,1182), (1789,250), (1176,87), (946,68)]
# Thiết lập một vùng quan tâm (RoI)
result = anpr_read_file(
b'roi.jpg', # Tên tệp đầu vào
b'text', # Định dạng đầu ra
b'vi810,64,939,1182,1486,1182,1149,571,879,124,839,64') # Sử dụng tùy chọn 'v' để chỉ nhận diện biển số gắn trên xe
# Thiết lập hai vùng quan tâm (RoI)
result = anpr_read_file(
b'roi.jpg', # Tên tệp đầu vào
b'text', # Định dạng đầu ra
b'vi810,64,939,1182,1486,1182,1149,571,879,124,839,64i771,67,479,1182,1793,1182,801,67')
# Thiết lập một vùng quan tâm và một vùng không quan tâm (RoU)
result = anpr_read_file(
b'roi.jpg', # Tên tệp đầu vào
b'text', # Định dạng đầu ra
b'vi810,64,939,1182,1486,1182,1149,571,879,124,839,64x851,70,923,134,1753,1182,1789,1182,1789,250,1176,87,946,68')
# Thiết lập một vùng không quan tâm (RoU)
result = anpr_read_file(
b'roi.jpg', # Tên tệp đầu vào
b'text', # Định dạng đầu ra
b'vx851,70,923,134,1753,1182,1789,1182,1789,250,1176,87,946,68')
2.4. Thiết lập kích thước tối thiểu của biển số
- Kích thước tối thiểu của biển số được chỉ định bằng diện tích của hộp giới hạn biển số (chiều rộng x chiều cao tính bằng pixel), sau ký tự
a. Ví dụ, nếu chiều rộng là100pixel và chiều cao là40pixel, thì sẽ ghi làa4000. -
Khi thiết lập kích thước tối thiểu, các biển số nhỏ hơn kích thước này sẽ bị bỏ qua.
# Ví dụ bằng Python # Kích thước biển số trong hình là 156 x 154 = 24024 result = anpr_read_file( b'test.jpg', # Tên tệp đầu vào b'text', # Định dạng đầu ra b'vi7,580, 829,293, 1910,325, 1798,1077, 0,1077a24024') # Thiết lập vùng quan tâm và kích thước tối thiểu của biển số
3. Định dạng dữ liệu xuất ra
Dữ liệu đầu ra được chia thành hai định dạng:
- Nhận diện đối tượng (khi
optionscó chứad) - Nhận diện biển số xe (khi
optionskhông chứad)
3.1. Kết quả nhận diện biển số xe
3.1.1. text
Chỉ xuất ra văn bản biển số xe.
Nếu có nhiều biển số, các biển số sẽ được phân tách bằng ký tự xuống dòng CR (0x0d).
29A02240
43HC00041
Nếu không nhận diện được biển số nào, sẽ xuất ra chuỗi rỗng kết thúc bằng ký tự NULL (NULL terminated string (0x00)).
Nếu có lỗi, sẽ xuất ra thông báo lỗi theo định dạng văn bản như dưới đây:
error: (1) Invalid parameters
3.1.2. csv
Xuất biển số xe và các thuộc tính dưới dạng csv.
Mỗi dòng tương ứng với một biển số xe được nhận diện, các cột được phân tách bằng dấu phẩy (,).
29A02240,1217,2083,92,175,12.45,0.75,0.83,0.20,ev
43HC00041,1108,1317,67,217,12.45,0.76,0.89,0.10,
Ý nghĩa của từng cột như sau:
| Cột | Ý nghĩa | Ghi chú
|—–:|—————————|————————
| 1 | Biển số xe | text
| 2 | Tọa độ x góc trên bên trái biển số | area.x
| 3 | Tọa độ y góc trên bên trái biển số | area.y
| 4 | Chiều rộng biển số | area.width
| 5 | Chiều cao biển số | area.height
| 6 | Góc của biển số | area.angle
| 7 | Độ tin cậy nhận diện ký tự | conf.ocr
| 8 | Độ tin cậy nhận diện biển số | conf.plate
| 9 | Thời gian nhận diện ký tự (giây) | elapsed
| 10(1) | Có phải xe điện thân thiện môi trường | attr.ev
- (1) (Chỉ dành cho biển số Hàn Quốc) Nếu là xe điện thân thiện môi trường, sẽ xuất
ev, nếu không thì để trống.
Nếu không nhận diện được biển số nào, sẽ xuất ra chuỗi rỗng kết thúc bằng ký tự NULL (NULL terminated string (0x00)).
Nếu có lỗi, sẽ xuất ra thông báo lỗi theo định dạng sau:
error,1,Invalid parameters
3.1.3. json
Xuất biển số xe và các thuộc tính dưới dạng json.
[
{
// Biển số đầu tiên
text: "29A02240", // Biển số xe
area: {
// Vùng biển số (đơn vị pixel)
x: 1217, // Tọa độ x góc trên bên trái
y: 2083, // Tọa độ y góc trên bên trái
width: 92, // Chiều rộng
height: 175, // Chiều cao
angle: 12.45, // Góc nghiêng (độ)
},
attrs: {
// Thuộc tính biển số
ev: true, // Có phải xe điện thân thiện môi trường không
},
ev: true, // đã ngưng dùng (đã chuyển sang attrs.ev, sẽ bị xóa ở phiên bản sau)
conf: {
// Độ tin cậy (giá trị từ 0 đến 1)
ocr: 0.75, // Độ tin cậy nhận diện ký tự
plate: 0.84, // Độ tin cậy nhận diện biển số
},
elapsed: 0.27, // Thời gian xử lý (đơn vị giây)
},
{
// Biển số thứ hai
text: "43HC00041",
area: {
x: 1108,
y: 1317,
width: 67,
height: 217,
angle: 12.45,
},
attrs: {
ev: false,
},
ev: false,
conf: {
ocr: 0.76,
plate: 0.89,
},
elapsed: 0.14,
},
];
Nếu không nhận diện được biển số nào, sẽ xuất dữ liệu rỗng như sau:
[];
Nếu có lỗi, sẽ xuất ra dưới dạng json như sau:
{
"error": {
"code": 1,
"message": "Invalid parameters"
}
}
3.1.4. yaml
Xuất biển số xe và các thuộc tính dưới dạng yaml.
- text: 29A02240 # Biển số đầu tiên, biển số xe
area: # Vùng biển số (đơn vị pixel)
x: 1217 # Tọa độ x góc trên bên trái
y: 2083 # Tọa độ y góc trên bên trái
width: 92 # Chiều rộng
height: 175 # Chiều cao
angle: 12.45 # Góc nghiêng (độ)
conf: # Độ tin cậy (giá trị từ 0 ~ 1)
ocr: 0.75 # Độ tin cậy nhận diện ký tự
plate: 0.83 # Độ tin cậy nhận diện biển số
attrs: # Thuộc tính biển số
ev: true # Có phải xe điện thân thiện môi trường không
ev: true # đã ngưng dùng (đã chuyển sang attrs.ev, sẽ bị xóa ở phiên bản sau)
elapsed: 0.20 # Thời gian xử lý (giây)
- text: 43HC00041 # Biển số thứ hai
area:
x: 1108
y: 1317
width: 67
height: 217
angle: 12.45
conf:
ocr: 0.76
plate: 0.89
ev: false
elapsed: 0.10
Nếu không nhận diện được biển số nào, sẽ xuất dữ liệu rỗng như sau:
Nếu có lỗi, sẽ xuất ra dưới dạng yaml như sau:
error
code: 1
message: Invalid parameters
3.1.5. xml
Xuất biển số xe và các thuộc tính dưới dạng xml.
<?xml version="1.0" encoding="utf-8"?>
<data>
<!-- Biển số đầu tiên
text: Biển số xe
ev: đã ngưng dùng (đã chuyển sang attrs.ev, sẽ bị xóa ở phiên bản sau)
elapsed: Thời gian xử lý (giây)
-->
<license-plate text="29A02240" ev="true" elapsed="0.20">
<!-- Thuộc tính biển số
ev: Có phải xe điện thân thiện môi trường không
-->
<attrs ev="true"/>
<!-- Vùng biển số (đơn vị pixel)
x: Tọa độ x góc trên bên trái
y: Tọa độ y góc trên bên trái
width: Chiều rộng
height: Chiều cao
angle: Góc nghiêng (độ)
-->
<area x="1217" y="2083" width="92" height="175" angle="12.45"/>
<!-- Độ tin cậy (giá trị từ 0 ~ 1)
ocr: Độ tin cậy nhận diện ký tự
plate: Độ tin cậy nhận diện biển số
-->
<conf ocr="0.75" plate="0.83"/>
</license-plate>
<!-- Biển số thứ hai -->
<license-plate text="43HC00041" ev="false" elapsed="0.11">
<attrs ev="false"/>
<area x="1108" y="1317" width="67" height="217"/>
<conf ocr="0.76" plate="0.89"/>
</license-plate>
</data>
Nếu không nhận diện được biển số nào, sẽ xuất dữ liệu rỗng như sau:
<?xml version="1.0" encoding="utf-8"?>
<data />
Nếu có lỗi, sẽ xuất ra dưới dạng xml như sau:
<?xml version="1.0" encoding="utf-8"?>
<error code="1" message="Invalid parameters" />
3.2. Kết quả nhận diện đối tượng
Tìm kiếm các đối tượng đã được huấn luyện trước trong hình ảnh.
Điểm nổi bật là có thể nhận diện các đối tượng bị biến dạng trong ảnh gốc chụp bằng camera mắt cá 360°.
Hiện tại, các đối tượng được hỗ trợ như sau:
| class | Tên tiếng Việt
|————–|———————————-
| car | Xe ô tô
| motorcycle | Xe máy
3.2.1. csv, text
Kết quả nhận diện đối tượng được xuất dưới dạng văn bản cvs.
Ngay cả khi chọn định dạng đầu ra là text, kết quả cũng sẽ được xuất dưới dạng csv.
Mỗi dòng tương ứng với một đối tượng được nhận diện, các cột được phân tách bằng dấu phẩy (,).
car,2171,2281,396,521,0.9679,0.2886,72TD00310,2420,2295,110,81,147.5933,0.9005,0.7864,0.3913,ev
car,264,2266,433,543,0.9706,0.2886,59UA02181,315,2281,103,81,211.3135,0.9160,0.8299,0.4189,
car,777,0,579,403,0.9716,0.2886 // Trường hợp không có thông tin biển số
Ý nghĩa của từng cột như sau:
| Cột | Ý nghĩa | Ghi chú
|—–:|———————————–|————————
| 1 | Loại đối tượng | class
| 2 | Tọa độ x góc trên bên trái đối tượng | area.x
| 3 | Tọa độ y góc trên bên trái đối tượng | area.y
| 4 | Chiều rộng | area.width
| 5 | Chiều cao | area.height
| 6 | Độ tin cậy | conf
| 7 | Thời gian xử lý (giây) | elapsed
| 8(1) | Biển số xe | licensePlate.text
| 9 | Tọa độ x góc trên bên trái | licensePlate.area.x
| 10 | Tọa độ y góc trên bên trái | licensePlate.area.y
| 11 | Chiều rộng biển số | licensePlate.area.width
| 12 | Chiều cao biển số | licensePlate.area.height
| 13 | Góc của biển số | licensePlate.area.angle
| 14 | Độ tin cậy nhận diện ký tự | licensePlate.conf.ocr
| 15 | Độ tin cậy nhận diện biển số | licensePlate.conf.plate
| 16 | Thời gian nhận diện ký tự (giây) | licensePlate.elapsed
| 17(2) | Có phải xe điện thân thiện môi trường | licensePlate.attrs.ev
- (1) Từ cột số 8 trở đi chỉ xuất hiện khi sử dụng tùy chọn
rvà có nhận diện được biển số xe, nếu không thì các cột sau sẽ bị bỏ qua. - (2) (Chỉ dành cho biển số Hàn Quốc) Cột số 17 sẽ xuất
evnếu nhận diện là xe điện thân thiện môi trường, nếu không thì để trống.
Nếu không nhận diện được đối tượng nào, sẽ xuất ra chuỗi rỗng kết thúc bằng ký tự NULL (NULL terminated string (0x00)).
Nếu có lỗi, sẽ xuất ra thông báo lỗi theo định dạng sau:
error,1,Invalid parameters
3.2.2. json
Kết quả nhận diện đối tượng được xuất dưới dạng json.
[
{ // Đối tượng đầu tiên
"class": "car", // Loại đối tượng
"area": { // Vùng đối tượng (đơn vị pixel)
"x": 2171, // Tọa độ x góc trên bên trái
"y": 2281, // Tọa độ y góc trên bên trái
"width": 396, // Chiều rộng
"height": 521 // Chiều cao
},
"conf": 0.9679, // Độ tin cậy nhận diện đối tượng (giá trị từ 0 ~ 1)
"elapsed": 0.2513, // Thời gian xử lý (giây)
"licensePlate": [ // Biển số xe
{
"text": "72TD00310" // Biển số xe
"area": { // Vùng biển số (đơn vị pixel)
"x": 2420, // Tọa độ x góc trên bên trái
"y": 2295 // Tọa độ y góc trên bên trái
"width": 110, // Chiều rộng
"height": 81, // Chiều cao
"angle": 147.5933 // Góc nghiêng (độ)
},
"attrs": { // Thuộc tính biển số
"ev": true // Có phải xe điện thân thiện môi trường không
},
"conf": { // Độ tin cậy (giá trị từ 0 ~ 1)
"ocr": 0.9005, // Độ tin cậy nhận diện ký tự
"plate": 0.7864 // Độ tin cậy nhận diện biển số
},
"elapsed": 0.3525, // Thời gian xử lý (giây)
}
]
},
{ // Đối tượng thứ hai
"class": "car",
"area": {
"x": 264,
"y": 2266,
"width": 433,
"height": 543
},
"conf": 0.9706,
"elapsed": 0.2513,
"licensePlate": [
{
"text": "59UA02181"
"area": {
"x": 315,
"y": 2281,
"width": 103,
"height": 81,
"angle": 211.3135
},
"attrs": {
"ev": false
},
"conf": {
"ocr": 0.916,
"plate": 0.8299
},
"elapsed": 0.4402
}
]
},
{ // Đối tượng thứ ba (không có thông tin biển số)
"class": "car",
"area": {
"x": 777,
"y": 0
"height": 403,
"width": 579,
},
"conf": 0.9716,
"elapsed": 0.2513
}
]
Nếu không nhận diện được đối tượng nào, sẽ xuất dữ liệu rỗng như sau:
[];
Nếu có lỗi, sẽ xuất ra dưới dạng json như sau:
{
"error": {
"code": 1,
"message": "Invalid parameters"
}
}
3.2.3. yaml
Kết quả nhận diện đối tượng được xuất dưới dạng yaml.
- class: car # Đối tượng đầu tiên, loại đối tượng
area: # Vùng đối tượng (đơn vị pixel)
x: 2171 # Tọa độ x góc trên bên trái
y: 2281 # Tọa độ y góc trên bên trái
width: 396 # Chiều rộng
height: 521 # Chiều cao
conf: 0.9678 # Độ tin cậy nhận diện đối tượng (giá trị từ 0 ~ 1)
elapsed: 0.3190 # Thời gian xử lý (giây)
licensePlate: # Biển số xe
- text: 72TD00310 # Biển số xe
area: # ùng biển số (đơn vị pixel)
x: 2420 # Tọa độ x góc trên bên trái
y: 2295 # Tọa độ y góc trên bên trái
width: 110 # Chiều rộng
height: 81 # Chiều cao
angle: 147.5933 # Góc nghiêng (độ)
attrs: # Thuộc tính biển số
ev: true # Có phải xe điện thân thiện môi trường không
conf: # Độ tin cậy (giá trị từ 0 ~ 1)
ocr: 0.9005 # Độ tin cậy nhận diện ký tự
plate: 0.7864 # Độ tin cậy nhận diện biển số
elapsed: 0.3226 # Thời gian xử lý (giây)
- class: car # Đối tượng thứ hai
area:
x: 264
y: 2266
width: 433
height: 543
conf: 0.9706
elapsed: 0.3191
licensePlate:
- text: 59UA02181
area:
x: 315
y: 2281
width: 103
height: 81
angle: 211.3135
conf:
ocr: 0.916
plate: 0.8299
attrs:
ev: false
elapsed: 0.5527
- class: car # Đối tượng thứ ba (không có thông tin biển số)
area:
x: 777
y: 0
width: 579
height: 403
conf: 0.9716
elapsed: 0.3191
Nếu không nhận diện được đối tượng nào, sẽ xuất dữ liệu rỗng như sau:
Nếu có lỗi, sẽ xuất ra dưới dạng yaml như sau:
error
code: 1
message: Invalid parameters
3.2.4. xml
Kết quả nhận diện đối tượng được xuất dưới dạng xml.
<?xml version="1.0" encoding="utf-8"?>
<data>
<!-- Đối tượng đầu tiên
class: Loại đối tượng
conf: Độ tin cậy nhận diện đối tượng (giá trị từ 0 ~ 1)
elapsed: Thời gian xử lý (giây)
-->
<object class="car" conf="0.9679" elapsed="0.3287">
<!-- Vùng đối tượng (đơn vị pixel)
x: Tọa độ x góc trên bên trái
y: Tọa độ y góc trên bên trái
width: Chiều rộng
height: Chiều cao
-->
<area x="2171" y="2281" width="396" height="521"/>
<!-- Biển số xe
text: Biển số xe
elapsed: Thời gian xử lý (giây)
-->
<license-plate text="72TD00310" elapsed="0.3961">
<!-- Thuộc tính biển số
ev: Có phải xe điện thân thiện môi trường không
-->
<attrs ev="true"/>
<!-- Vùng biển số (đơn vị pixel)
x: Tọa độ x góc trên bên trái
y: Tọa độ y góc trên bên trái
width: Chiều rộng
height: Chiều cao
angle: Góc nghiêng (độ)
-->
<area x="2420" y="2295" width="110" height="81" angle="147.5933"/>
<!-- Độ tin cậy (giá trị từ 0 ~ 1)
ocr: Độ tin cậy nhận diện ký tự
plate: Độ tin cậy nhận diện biển số
-->
<conf ocr="0.9005" plate="0.7864"/>
</license-plate>
</object>
<!-- Đối tượng thứ hai -->
<object class="car" conf="0.9706" elapsed="0.3287">
<area x="264" y="2266" width="433" height="543"/>
<license-plate text="59UA02181" elapsed="0.4364">
<attrs ev="false"/>
<area x="315" y="2281" width="103" height="81" angle="211.3135"/>
<conf ocr="0.9160" plate="0.8299"/>
</license-plate>
</object>
<!-- Đối tượng thứ ba (không có thông tin biển số) -->
<object class="car" conf="0.9716" elapsed="0.3287">
<area x="777" y="0" width="579" height="403"/>
</object>
</data>
Nếu không nhận diện được đối tượng nào, sẽ xuất dữ liệu rỗng như sau:
<?xml version="1.0" encoding="utf-8"?>
<data />
Nếu có lỗi, sẽ xuất ra dưới dạng xml như sau:
<?xml version="1.0" encoding="utf-8"?>
<error code="1" message="Invalid parameters" />
4. Bảng mã lỗi
Toàn bộ danh sách lỗi được thể hiện trong bảng dưới đây.
| code | message | Giải thích |
|---|---|---|
1 |
Invalid parameters |
Trường hợp tham số gọi hàm không hợp lệ |
2 |
File not found |
Trường hợp không tìm thấy tệp hình ảnh đầu vào |
3 |
Invalid image |
Trường hợp bộ nhớ hình ảnh đầu vào không đúng định dạng |
4 |
Unsupported image format |
Trường hợp hình ảnh đầu vào có định dạng không được hỗ trợ |
100 |
License expired |
Trường hợp giấy phép (license) đã hết hạn |
101 |
Corrupted library |
Trường hợp một số tệp cấu hình thư viện bị thiếu hoặc bị hỏng |
102 |
Not initialized |
Trạng thái chưa khởi tạo engine |
103 |
Too many workers |
Số luồng gọi thư viện vượt quá giới hạn (tối đa 256) |
104 |
Resource exhausted |
Trường hợp không thể cấp phát thêm tài nguyên |
105 |
License not installed |
Trạng thái chưa cài đặt giấy phép (xảy ra khi chưa cài đặt license dùng thử miễn phí trên Linux) |
106 |
USB dongle I/O error |
Xảy ra khi không đọc được USB dongle chứa license |
107 |
License required |
Không có license để sử dụng chức năng này |
108 |
Unsupported platform |
Xảy ra khi chạy trên môi trường không được hỗ trợ |
200 |
Unknown |
Các lỗi khác chưa được định nghĩa |